鈴鹿高専は,アイデア対決全国高等専門学校ロボットコンテスト(通称高専ロボコン)に第2回大会から出場しています。現在,80名以上の学生が鈴鹿高専ロボコンプロジェクトとして参加し,ロボットを製作すると同時に,チームワークや社会性,技術力の向上に励んでいます。
打田は, 鈴鹿高専ロボコンプロジェクトの一員として,2011年度より高専ロボコンの指導教員を担当しています。ここでは,2011年度からの高専ロボコン出場ロボットを紹介します。
以下で紹介する高専ロボコンのロボットには、最先端の機械工学、電気工学の知識から、最新の画像処理技術、パワーエレクトロニクスが利用されています。高専ロボコンでは、授業だけでは得ることができない実践的な問題解決能力や様々な技術を身に着けることができます。 ですので、将来皆さんが企業で働くようになったときに相当なアドバンテージになると思います。
小学生、中学生、高専生の皆様、みんなを驚かせるような世界一のロボットを作りませんか?きっと楽しいと思います。
エール、アッシー<2014年高専ロボコン「出前迅速」出場ロボット>
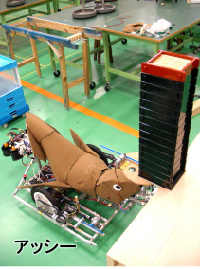
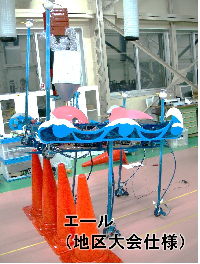
Aチームのエール、Bチームのアッシーが高専ロボコン2014に参加しました。
エールは東海北陸地区大会で出前迅速賞と技術賞を受賞し、全国大会ではアイデア賞を受賞しました。
このエールは、クジラが大海原を遊泳する様子を模したもので、
さまざまなセンサやコンピュータを搭載し、大会で唯一、全自動で競技を遂行することを可能にした自律型ロボットです。
このエールには、既存のセンサだけではなく高専ロボコン用に新たに開発したセンサシステム等、様々なシステムが搭載されています。全自動を実現するために回路のみでも数キログラムに及びました。
そのため,機構もシンプルかつ軽量、確実に動作するように造られています。
ここに掲載している写真は地区大会仕様で、全自動に加えスラロームゾーンのパイロン越えを実現するロボットでした。しかしながら、全国大会では、全自動で30枚の蒸籠を運ぶことを目的としたため、パイロン越えをあきらめ、
全国大会用にほぼゼロからメカを造りなおしました。
一方、アッシーは東海北陸地区大会でベスト8になり、特別賞を受賞しました。セッティング時間の起動手順ミスで、惜しくも第2回戦敗退となってしまいました。このロボットはかなりシンプルに造られており、 ラジコンのプロポでの手動操縦で、一度に少ない枚数の出前を何往復もすることを目的にしていました。実力的にはエールをしのぐものを持っていました。
メルシー、ロックホッパー<2013年高専ロボコン「シャルウィージャンプ」出場ロボット>
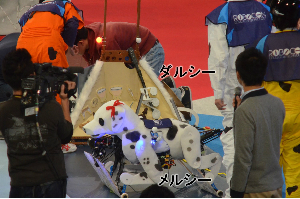

Aチームのメルシー(ジャンパロボット)+ダルシー(縄回しロボット)、Bチームのロックホッパーが高専ロボコン2013に参加しました。
メルシーは、ダルメシアンを模したもので東海北陸地区大会でシャルウィージャンプ賞を受賞し、全国大会に出場しました。全国大会では、ベスト8まで勝ち進みましたが、約1秒の差で米子高専に破れましたた。しかしながら、 技術賞とシャルウィージャンプ賞のダブル受賞を果たしました。
Aチームのジャンパロボットであるメルシーの見所は、自律型でロボット自身が意思を持って競技を行っているように見えるところです。それを実現するのはMITの基礎理論をベースとしたジャンプ機構、新たに開発した選手認識センサシステムです。 ジャンプ機構は、共振によって少ないエネルギーでジャンプすることができるため、機構が壊れるまでの数百回にも及ぶジャンプも可能なほどです。 この機構の基本設計にはMATLAB/Simulinkが用いられています。しかしながら、強度の確保と安定性の獲得に大変苦労し満足にジャンプできるようになったのは9月に入ってからでした。ちなみに、前進と後退、左右旋回はファンによる風の力を用いています。 一方、選手認識システムは、高輝度LEDとフレームレートの高いカメラを用いたもので、前年度のキネクトの問題点を改善し、国技館の照明外乱下においてもロバストな選手認識を実現しています。
メルシーの相方、縄回しロボットのダルシーの見所は、自動縄回しシステムです。ダルシーはこのシステム用いて、メルシーがジャンプするタイミングを常に推定しています。さらに、縄をまわすスピードを制御し、できるだけメルシーが縄に引っかからないように 縄をまわします。このシステムによって、練習段階からほとんど縄に引っかかることはありませんでした。さらに、練習段階では縄二本にも挑戦していましたが、そこそこそれも可能なほどでした。
一方、Bチームのロックホッパーは地区大会ににおいて、ドライアイスの煙で会場をわかせたものの、プログラムのトラブルで満足に競技をすることができませんでした。
エンペラー、九頭竜<2012年高専ロボコン「ベストペット」出場ロボット>


鈴鹿高専から、Aチームのエンペラー、Bチームの九頭竜が高専ロボコン2012に参加しました。 エンペラーは東海北陸地区大会で優賞(初優勝)し、ベストペット賞を受賞しました。九頭竜は地区大会ベスト4になり、特別賞を受賞しました。エンペラーは、皇帝ペンギンをモチーフにしたロボットで、全国大会に出場し全国大会で鈴鹿高専初勝利を挙げベスト4となりました。 九頭竜はその名の通り、伝説に登場する九頭竜がモチーフになっています。
2012年のテーマはベスト・ペットで、この二つのロボットは、両方とも頭のいいペットロボットです。例えば、選手を自動で追いかけ、自動でゴールの位置を認識することができ、自動でゴールに玉を入れることができます。 ですので、高専ロボコン用のロボットでありながら、全くの初心者のお子さんでも操縦することができ、簡単にパーフェクトを達成させることができます。
エンペラーは、全国大会に向けた多数の改良で地区大会のタイムを20秒も短縮させ、全国大会でベスト4まで勝ち進みました。これは、みんなの熱意と努力のたまものです。 一方、九頭竜は、残念ながら地区大会でその性能を発揮することができませんでした。9個のボールを同時に長距離発射し、地区大会時のエンペラーより短い時間でパーフェクトを達成できる可能性がありました。
白千鳥+赤千鳥、ロングロングアゴー<2011年高専ロボコン「ロボボウル」出場ロボット>
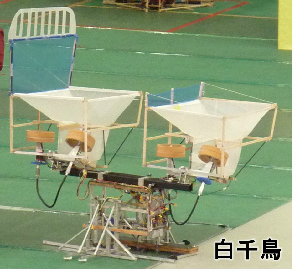
鈴鹿高専から、Aチームの白千鳥+赤千鳥、Bチームのロングロングアゴーが高専ロボコン2011に参加しました。
白千鳥は東海北陸地区大会でベスト4まで勝ち進み,技術賞を受賞しました。ロングロングアゴーは特別賞を受賞しました。
白千鳥は超強力なアメフトボールの発射機構を二つ搭載し、ディフェンスロボットが妨害できない幅までその発射機構を展開し発射するアイデアでした。第3回戦で、岐阜高専との死闘に破れました。技術賞を獲得したものの、全国大会には推薦されませんでした。
ロングロングアゴーの発射機構は大会において例をみないもので、人間の腕を模したリンク機構を採用していました。
