打田研究室では、制御工学、ロボット工学、電気機器工学等を中核として、福祉ロボットに関する研究や電磁アクチュエータに関する研究を行っています。
このページでは、現在取り組んでいる研究テーマを紹介します。
上肢用ポータブルリハビリシステム(ICORO)
近年の高齢化と脳卒中患者増加の背景から、体が不自由な人が増加しています。運動機能の回復にはリハビリテーション等が必要不可欠です。本研究室では、 リハビリを楽しみながら、かついつでもどこでも行うことができる小型、軽量な上肢用のリハビリ支援装置を開発しています。
このシステムは、小型・軽量・安価なポータブルリハビリロボットと、リハビリ用のPCアプリケーションから構成されます。患者は、ロボットのグリップに上肢を固定し、平面上を移動させます。 テレビゲーム用のジョイスティックをそのまま平面上でスライド移動させるようなものです。さらに、アクチュエータを搭載しているため、ロボットを自動で動かしたり、患者に反力を与えたりすることができます。
下記の動画の例のように、プログラムを変更することで、様々な動作をさせることができます。
○軌道拘束機能
○マスタスレーブ機能
○負荷の設定・変更(画面の緑のところにロボットが差し掛かると、ロボットを動かすために必要な力が増加し、抵抗感が増加します。)
このロボットは、カバンに入れて持ち運べるようなサイズで、ちょっと頑張ればどこへでも持っていくことができ、PCと机さえあればどこでも上肢のリハビリが可能なもので、その実用化に向けて研究開発を行っています。
現在、ロボットの操作感(極力スムーズに、違和感なく動作するように)の改善と操作性の改善、リハビリへのモチベーションを向上させることができるゲームアプリケーション(シリアスゲーム)の開発を行っています。
☆医療関係者の方の意見を多く取り入れ、より良いものにしたいと考えております。もしご興味がありましたら気兼ねなくご連絡いただけましたらと思います。
手関節可動域計測システム
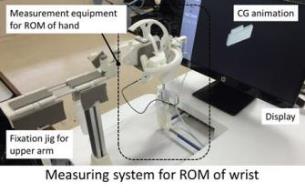
手関節の可動域を容易かつ正確に計測することができる装置の開発を行っています.
このシステムでは,6自由の装置を装着し,手関節に関する可動域(嘗背屈,尺トウ屈+回内外)を計測します.その計測値はPCに保存できるだけではなく,動作がアニメーションでPC画面上に表示されるようになっています.
ここに紹介しているものは据置型の物ですが,現在はウェアラブルタイプの計測装置を開発しています。
快適なウェアラブルロボット
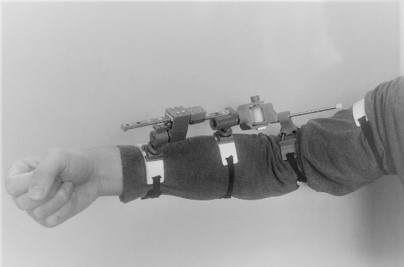
現在,人の動作をアシストするウェアラブルロボットが注目されています。しかしながら,装着感が悪かったり,重かったりで日常的に利用するには問題があります。 そこで本研究では,ウェアラブルロボットの装具(人体との結合部)に着目し,日常でも苦にならない快適なウェアラブルロボットの実現を目指して研究を行っています。
現在,ロボットの試作を行っています。体幹バランス改善支援ロボット(リハビリテーション支援ロボット)

脳卒中患者は年々増加しており、患者さん自身の生活が不自由になるだけではなく、さまざまな面で深刻な問題を引き起こしており、将来の日本において必ず解決すべき問題であるといえます。 脳卒中片麻痺患者さんでは、麻痺のせいで体の左右バランスが崩れていしまいます。これによって、起立動作や歩行動作への負担が大きくなってしまいます。
このロボットは、片麻痺患者さんの患側を重点的にトレーニングし, 「バランスの良い」動作(歩行・起立)の獲得を目的としたものです。さらに,ロボットにサポートされ安定な姿勢で安心してトレーニングできることも目指しています。現在、医療関係者、他研究機関の研究者と協力して、研究を行っています。
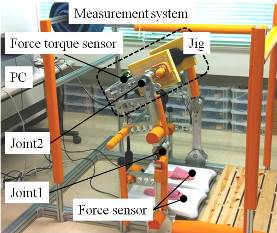
用途指向型モータ(リニアモータ)の設計1<起立トレーニング支援ロボット用リニアモータの設計>
上記の起立トレーニング支援ロボットに搭載するためのリニアモータを実現することを目的に研究を行っています。
起立トレーニング支援ロボット用のアクチュエータには、バックドライバビリティが高いこと、可動子質量が小さいこと、可動子と固定子を含めた体格がコンパクトなことが求められます。 この要求を満足する可能性があることから、デュアルハルバッハ型を基本とするリニアモータの設計を行っています。
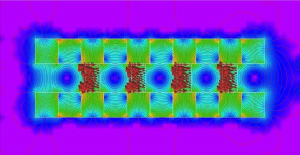
用途指向型モータ(リニアモータ)の設計2<自動車エンジン用電磁駆動バルブ>

小型・高加減速リニアモータを用いて、自動車エンジン用電磁駆動バルブを実現することを目的に研究を行っています。
自動車エンジン用電磁駆動バルブとは、エンジンの吸排気バルブに使用するもので、 従来のカム機構に換えて電磁力を用いたアクチュエータによってバルブをダイレクトに駆動するものです。電磁駆動バルブを用いることでカム形状に依存しない自由な軌跡でのバルブ開閉が可能となり、現在の可変動弁機構と比べてさらに燃費を改善させることができます。
現在、電気自動車が普及しつつありますが、内燃機関は依然として様々な分野で利用されています。この電磁駆動バルブに関する研究で培った技術はそのまま他の内燃機関に応用可能ですので、これは将来の地球にとって必要不可欠な技術の一つと言えます。
この電磁バルブに関する研究では、バルブを高速に開閉させるための、数十G以上の超高加減速リニアモータとそれを高精度に制御するロバスト制御系に関する研究を行っており、日々それらの性能改善を行っています。
最近では、エンジンの点火テストに向けてエンジンの振動下におけるリニアモータと制御系の評価を行っています。
用途指向型モータ(回転系モータ)の設計3<軽車両用駆動モータの設計>

環境志向と高齢化の背景から、一人で移動するための小型電動バイクやシニアカーが注目されています。本研究室では、それらをさらに高性能化するために、 もう一度その利用形態、状況を調査し直し、その利用され方に最適なモータの設計を行っています。
利用状況に最適なモータ設計(用途指向型モータ設計)を行うことで、燃費性能と利便性を高い次元で両立した電動バイクを実現することができます。
その他の研究
・スキルアシスト:柔軟物の搬送や、剛性の低い部品の組付け作業などにおいて、作業に慣れていない初心者の場合は、不用意な操作によって振動を発生させてしまい作業効率を低下させてしまいます。そこで、本研究室では作業者に違和感を与えることなく振動を低減する制御手法を提案しています。
・新型インホイールモータを用いた車両の姿勢制御:電気自動車用のインホイールモータに関する研究です。ばね下荷重の増加を最小限にするインホイールモータ機構を提案し、それを搭載した車両の制御と、トータルでの有効性の検証を行っています。
